What Is the Default Velocity of the Vr Robot
The following are 16 code examples for showing how to use pybulletVELOCITY_CONTROLThese examples are extracted from open source projects. What is the maximum velocity setting for the VR bot.
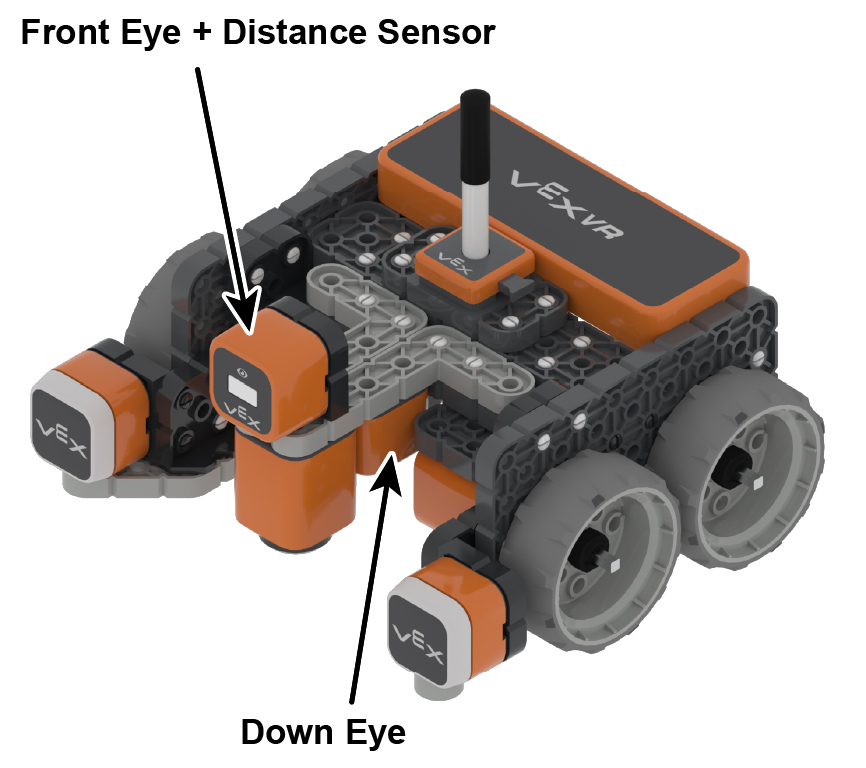
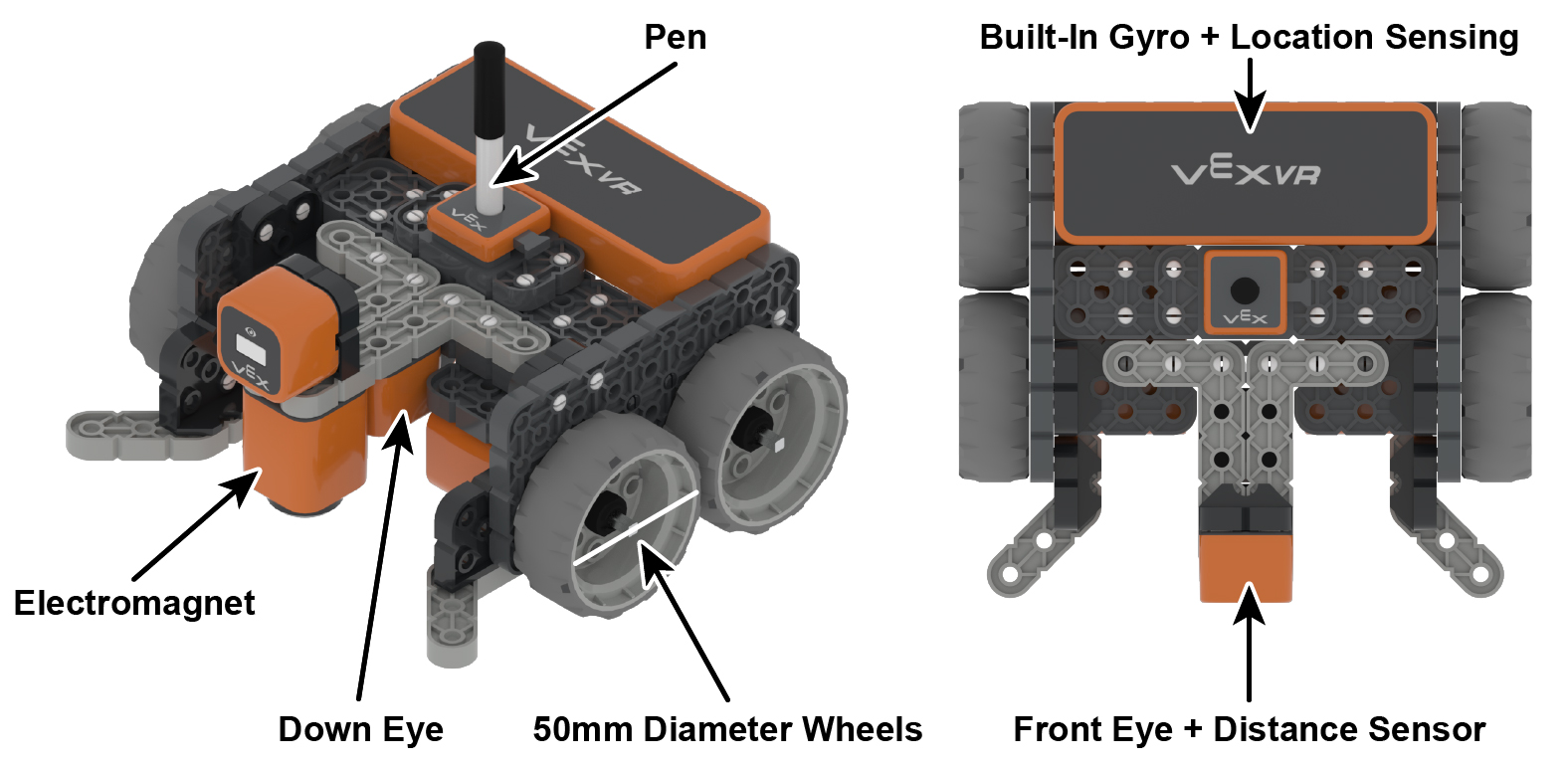
Using The Distance Sensor In Vexcode Vr Stem Library
It will turn left 180 degrees set velocity back to the default and drive forward 1000 millimeters mm.
. The robot Release the DEADMAN Switch While teaching or manually operating a robot operators should. This robot with a camera is placed in a remote location to capture the environment in visual form using Raspberry Pi RPi. And its not hard to see why.
You can vote up the ones you like or vote down the ones you dont like and go to the original project or source file by following the links above each example. This is likely because your hand is inverted on the wrong axis make sure the x is set to be the negative scale on the inverted hand. Have programmed your robot to drive or turn before you probably did it with the default velocity.
The VR Robot will drive forward 1000 millimeters mm at maximum velocity. The VR Robot will drive forward 1000 millimeters mm at maximum velocity. The VR Robot will drive forward 1000 millimeters mm at maximum velocity.
When we take integral of the output we get position of the robot. The VR Robot will drive forward 1000 millimeters mm at maximum velocity. It will turn left 180 degrees set velocity back to the default and drive forward 1000 millimeters mm.
The default velocity is 50 of the maximum velocity. VEXcode VR is the version you have been using all along. If you are using a linear track rail you should place the robot nested attached to the rail in the tree as shown in the following image.
1Load your additional axis from our library or model it as a new mechanism. To make a project that works as intended. Turn to heading What is the first step in coding the VR Robot to move the VR Pen down to draw a black line.
Orientation of a 3D rigid body. Never wear items or loose clothing that could get caught in moving machinery Keep long hair tied back and out of the way to avoid a potentially dangerous accident from occurring Visually inspect the robot and work. The VR Robot will drive forward 1000 millimeters mm at maximum velocity.
It will turn right 180 degrees set velocity back to the default and drive forward 1000 millimeters mm. See PHYSICS SETTINGS Why is the sway messed up for one of the hands. Ship between the factor and the value added on default velocity.
It will turn right 180 degrees set velocity back to the default and drive forward 1000 millimeters mm. Which comment is someone who has a conventional personality type likely to make. It will turn right 90 degrees set velocity back to the default and drive forward 1000 millimeters mm.
Squeezed by the ongoing e-commerce boom and a nationwide labor crunch companies are finding they need these technologies to boost fulfillment speed and accuracy at a time when adding people is no longer an option. To make the VR Robot skip around to random commands. The default velocity is the velocity that the Smart Motors turn at automatically - if you dont add any type of block for setting the velocity.
It will turn right 180 degrees set velocity back to the default and drive forward 1000 millimeters. Also wort to mention about MiniTracker_model Function code below of the model. The default max angular velocity in the physics settings is far too slow.
It will turn right 180 degrees set velocity back to the default and drive forward 1000 millimeters mm. The maximum velocity is 100. Which block rotates the VR robot to a given degree direction.
Final terminal velocity is used for LLRR control and it is sent to VR software for model action synchronization. This relies mainly on the angular velocity readings of an IMU. 2Build a RoboDK station placing the robot and axesmechanisms in their location.
Why is it important to correctly sequence commands in a project. What is the default velocity of the VR bot. The most common use is to track the head that wears a VR headset but it may apply to tracking handheld controllers or other devices.
Robotics and automation have never been hotter. The captured visuals are displayed on the users virtual reality VR headset. It will turn right 180 degrees set velocity back to the default and drive forward 1000 millimeters mm.
An added feature allows the camera to move in the direction of the users head movements. The VR Robot will drive forward 1000 millimeters mm at maximum velocity. VEXcode VR Enhanced has improved the graphics and resource access making it more engaging and accessible.
Section 93 addresses the tracking of position and orientation together which in most systems. It will turn left 180 degrees set velocity back to the default and drive forward 1000 millimeters mm. Drag the Move robot pen block into the workspace and use the.
I recommend increasing it to at least 30. It will turn right 90 degrees set velocity back to the default and drive forward 1000 millimeters mm. With VEXcode VR Advanced you can teach Data Science Artificial Intelligence Self Driving Vehicles and bring competitions to the CS classroom.
When the wb_robot_step function returns the motor has moved by a certain linear or rotational amount which depends on the target position the duration of the control step specified with the wb_robot_step function argument the velocity acceleration force and other parameters specified in the wbt description of the MotorFor example if a very small control step or a low. It is simple Kinematic model of the Minitracker robot and gives the X_prime Y_Prime and Theta_Prime as output.
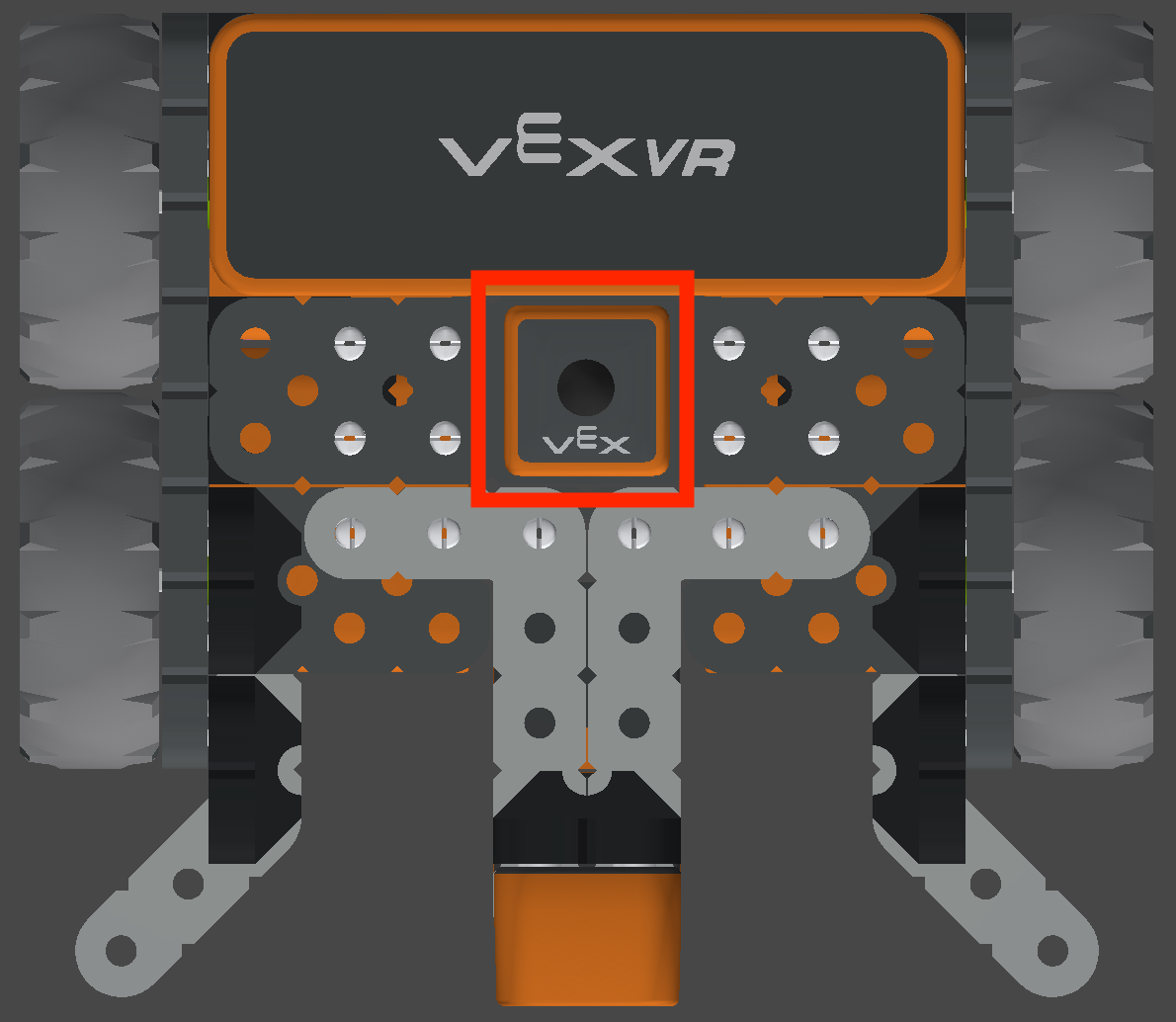
Using The Location Sensor In Vexcode Vr Stem Library
Vexcode Vr Is Now Available Vex News Vex Forum
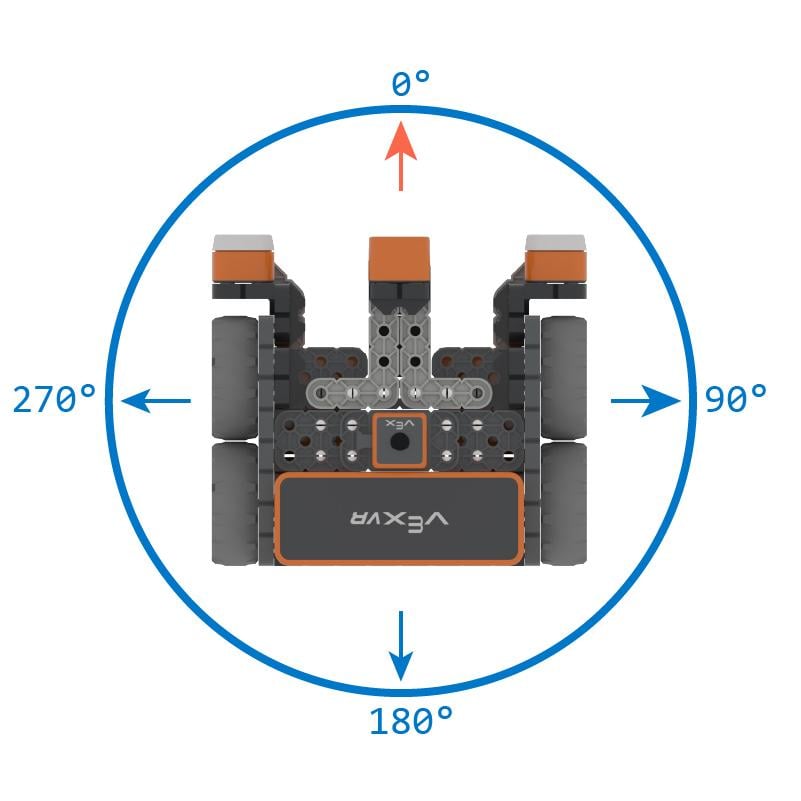
Unit 2 Moving Your Robot Lesson 3 Turn To Heading Vex Education



Comments
Post a Comment